
Dysponent: Politechnika Warszawska, Wydział Geodezji i Kartografii; PCSS-IChB PAN
Kontakt: dr inż. Magdalena Pilarska-Mazurek ![]() mgr Jacek Walczak
mgr Jacek Walczak ![]()
Opis Metody
Skanowanie laserowe z BSP (Bezzałogowego Statku Powietrznego, ang. ULS – Unmaned aerial vehicle Laser Scanning) to metoda teledetekcyjna, służąca do rejestrowania topografii obiektów o niewielkim i średnim zasięgu terenowym, zwykle do ok. 36 ha (600 x 600 m). Metoda ta należy to technik aktywnych, tj. sensor LiDAR zamontowany na pokładzie BSP wysyła w pod różnymi kątami impulsy laserowe. Na ogół jest to laser działający w bliskiej podczerwieni (o długość fali 905 nm), a liczba generowanych na sekundę impulsów zawiera się w przedziale od 100 do 300 tysięcy. Wiązka lasera odbija się od elementów pokrycia terenu lub gruntu, a urządzenie rejestruje czas jej powrotu – dzięki temu możliwe jest wyznaczanie odległości pomiędzy BSP a obiektem, od którego nastąpiło odbicie. Jednocześnie na pokładzie BSP umieszczony jest dokładny odbiornik GNSS wraz z sensorem inercjalnym pozwalającym na określenie położenia BSP w chwili wysłania impulsu laserowego. Unikalną cechą, stanowiącą jego przewagę nad zdjęciami wykonywanymi z powietrza czy scenami satelitarnymi jest możliwość penetracji roślinności i rejestracji wielu odbić. Wiązka lasera mająca kształt stożka mierzącego w przekroju (w zależności od odległości od BSP) od kilku do kilkunastu cm szerokości. W przypadku trafienia w roślinność wiązka częściowo się odbija (od liści, gałęzi), a częściowo przechodzi niżej. W ten sposób dla jednego wysłanego impulsu lasera możliwa jest rejestracja kilku odbić (w przypadku skanowania z BSP: na ogół do 2-3 odbić), z których pierwsze odbicie pochodzi od górnych partii szaty roślinnej, a kolejne od niżej położonych obiektów np. gruntu. Poszczególne odbicia przetwarzane są do postaci punktów 3D, które tworzą tzw. chmurę punktów będącą podstawowym rodzajem danych rejestrowanych z wykorzystaniem techniki skanowania laserowego. Dane takie można poddać dalszemu przetwarzaniu np. filtracji czy klasyfikacji mającej na celu wyodrębnienie punktów reprezentujących poszczególne obiekty (grunt, zabudowania, roślinność), co ma głównie zastosowanie w przypadku dokumentacji stanowisk archeologicznych położonych w terenach zalesionych. Ponadto, chmurę punktów można pokolorować z wykorzystaniem wykonanych synchronicznie zdjęć (również z BSP), na ogół w barwach rzeczywistych (RGB), rzadziej z wykorzystaniem podczerwieni czy zobrazowań termalnych, co jest stosowane w przypadku tworzenia dokumentacji 3D dla obiektów dziedzictwa kulturowego, które trudno jest w całości udokumentować z poziomu terenu.
Zastosowanie
Skanowanie laserowe z BSP można wykonywać zarówno nad obszarami zalesionymi, odkrytymi, jak i budowlami. Technologia ta jest przede wszystkim wykorzystywana w archeologii do pozyskiwania danych dla obszarów zalesionych, w przypadku gdy inne techniki pomiarowe są trudne bądź niemożliwe do zastosowania. Wykorzystuje się ją również w przypadku, gdy dla konkretnego obiektu ogólnodostępne dane z lotniczego skanowania laserowego (na portalu geoportal.gov.pl) nie są wystarczającej dobrej jakości. W przypadku wykorzystania skanowania laserowego możemy uzyskać numeryczny model terenu przedstawiający samą topografię, bez roślinności, czego nie można uzyskać analizując zdjęcia lotnicze czy satelitarne. W przypadku nalotów dla budowli naloty wykonuje się nad obiektem, lub dla jego górnych partii – gdzie nie jest możliwe pozyskanie danych z ziemi.
Instrument
Będący na wyposażeniu zespołu zestaw aparatury służący do skanowania laserowego składa się z wielowirnikowca (BSP) DJI Matrice 300 RTK wyposażonego w skaner miniVUX-3UAV firmy RIEGL wraz z systemem APX15 służącym do wyznaczania trajektorii. Masa startowa zestawu nie przekracza 10 kg i jest on w pełni przystosowany do wykonywania operacji (lotów) poza zasięgiem wzroku (BVLOS). W przypadku potrzeby wykonania również zdjęć posiadamy kamery DJI Zenmuse P1 (45 MPx, pełna klatka), kamerę termalną XT2 (możliwość odczytu wartość bezwzględnych temperatury w stopniach Celsjusza) – przeznaczonych do lotów na tej samej platformie (DJI Matrice 300). Do wykonywania zdjęć wielospektralnych (w czterech kanałach: G,R,RE,NIR) przeznaczony jest osobny bezzałogowiec DJI Mavic 3E MS.
Dane techniczne skanera Riegl miniVUX-3UAV:
- Wiązka laserowa: podczerwona (rozbieżność wiązki 1.6 x 0.5 mrad),
- Mechanizm skanowania: obracające się lustro (maksymalna prędkość skanowania: 100 linii na sekundę),
- Częstotliwość skanowania: 100/200/300 kHz
- Max liczba rejestracji odbić jednej wiązki: 5
- Dokładność pomiaru odległość: 15 mm
IMU Applanix APX-15 UAV (dokładność określenia Roll, Pitch: 0.025°, Heading: 0.08°; częstotliwość pomiaru: 200 Hz)
Dane techniczne kamery DJI Zenmuse P1:
- Matryca: 45 MPx, rozmiar piksela na matrycy: 4.4 μm
- Ogniskowa obiektywu: 35mm
- Minimalny interwał między zdjęciami: 0.7 s
- Prędkość migawki: mechaniczna: 1/2000-1 s (przysłona nie większa niż f/5.6), elektroniczna: 1/8000-1 s
- Przysłona: f/2.8-f/16
- Stabilizacja gimbalu: 3-osiowa
- GSD – 1,26 cm @ 100 m AGL
Dane techniczne kamery DJI Mavic 3 Multispectral:
- Kamera RGB: matryca 4/3 CMOS, efektywna liczba pikseli: 20 MPx
- Kamera wielospektralna: matryca CMOS 1/2.8-cala, efektywne piksele: 5 MP
- Zakresy spektralne kamery wielospektralnej: Zielony/Czerwony/Czerwień brzegowa /Bliska podczerwień
- GSD – 4,6 cm A 100 m AGL kamera multispektralna, 2,7 cm @100 AGL kamera RGB
Warunki badania
Aby wykonać nalot BSP spełnione muszą być odpowiednie warunki atmosferyczne, zgodnie ze specyfikacją sprzętu (zarówno BSP, jak i sensora zamontowanego na BSP). Warunki te dotyczą przede wszystkim wiatru (max odporność na wiatr: 15m/s), temperatury (np. naloty tylko przy temperaturze dodatniej) oraz opadów deszczu/śniegu. Ponadto w przypadku danych ze skanowania laserowego dla obszarów zalesionych naloty należy wykonywać w okresie bezlistnym, aby penetracja wiązki przez roślinność była jak największa i aby uzyskać jak najwięcej punktów na gruncie. Ze względu na wykorzystanie sygnału GNSS do wyznaczania położenia skanera w trakcie pomiaru nie jest możliwe wykorzystanie tego instrumentu we wnętrzach budynków.
Format wyników pomiarów
Wynikiem skanowania laserowego są chmury punktów, na podstawie których można wykonywać modele 3D czy przekroje. Najczęściej chmura punktów podlega filtracji, w wyniku której wyróżniane są punkty przedstawiające grunt. Na ich podstawie generowany jest numeryczny model terenu wraz z pochodnymi modelami, np. modelem cieniowanym.
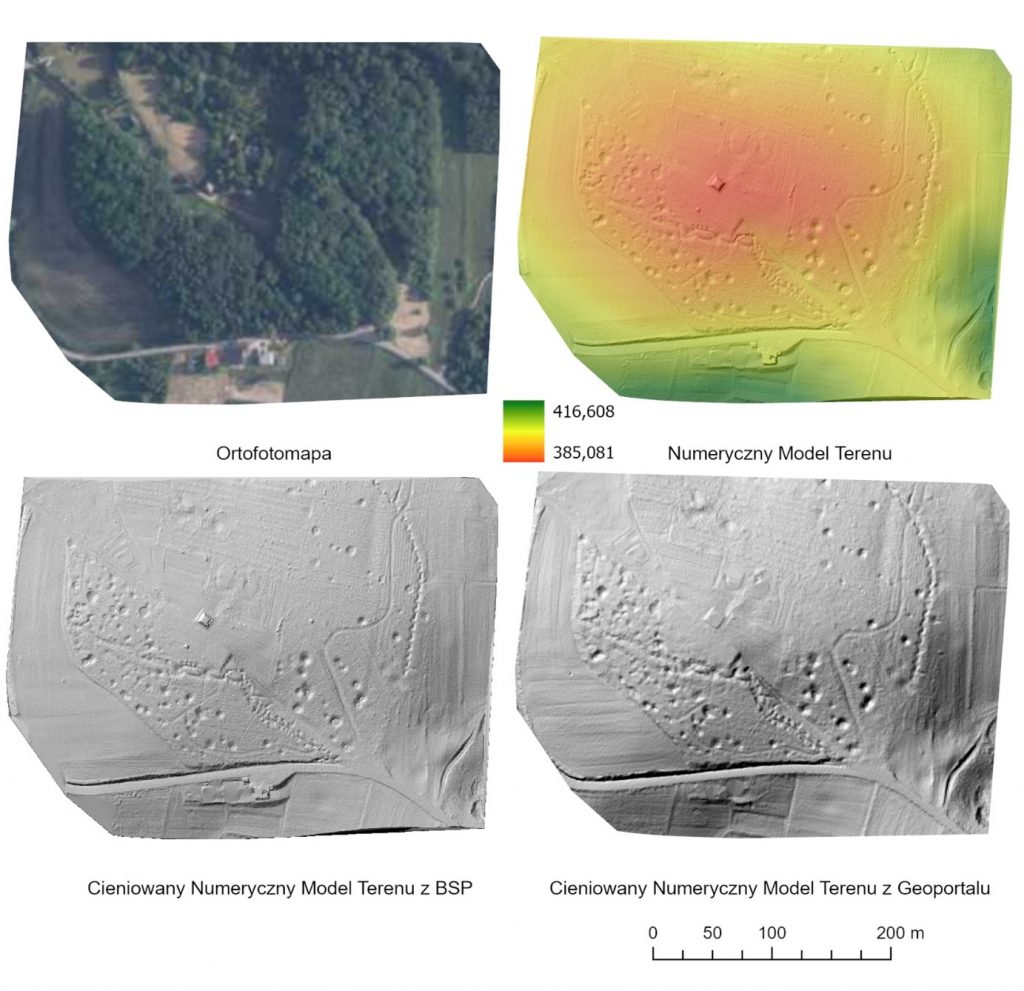
Przykładowy wynik skanowania z bezzałogowego statku powietrznego
Przykładowe wyniki (bibliografia)
Cappellazzo, M., Baldo, M., Sammartano, G., & Spanò, A. (2023). Integrated Airborne Lidar-Uav Methods for Archaeological Mapping in Vegetation-Covered Areas. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 48, 357-364.
Masini, N., Abate, N., Gizzi, F. T., Vitale, V., Minervino Amodio, A., Sileo, M., … & Cavalcante, F. (2022). UAV LiDAR based approach for the detection and interpretation of archaeological micro topography under canopy—The rediscovery of Perticara (Basilicata, Italy). Remote Sensing, 14(23), 6074.
Storch, M., Jarmer, T., Adam, M., & de Lange, N. (2021). Systematic approach for remote sensing of historical conflict landscapes with UAV-based laserscanning. Sensors, 22(1), 217.
Poirier, N., Baleux, F., & Calastrenc, C. (2020). The mapping of forested archaeological sites using UAV LiDaR. A feedback from a south-west France experiment in settlement & landscape archaeology. Archéologies numériques, 4(2).
Zapłata, R., Bakuła, K., Stereńczak, K., Kurczyński, Z., Kraszewski, B., & Ostrowski, W. (2018). Zalecenia odnośnie do pozyskiwania, przetwarzania, analizy i wykorzystania danych LiDAR w celu rozpoznania zasobów dziedzictwa archeologicznego w ramach programu AZP–między teorią a praktyką. Kurier Konserwatorski, (15).
Ostrowski, W., & Hanus, K. (2016). Budget UAV systems for the prospection of small-and medium-scale archaeological sites. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 41, 971-977.